 |
foxBMS
1.6.0
The foxBMS Battery Management System API Documentation
|
|
foxBMS
1.6.0
The foxBMS Battery Management System API Documentation
|
Configuration for the CAN module. More...
#include "can_cfg.h"#include "can_cbs_rx.h"#include "can_cfg_rx-message-definitions.h"#include "database.h"#include "ftask.h"#include <stdint.h>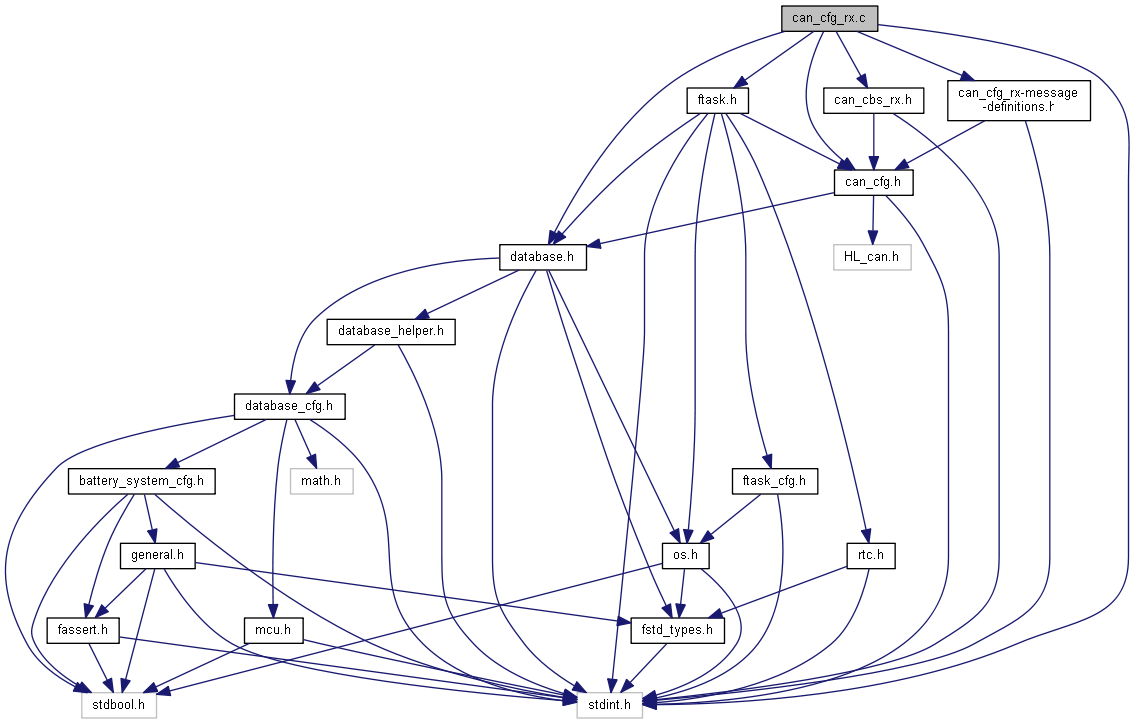
Go to the source code of this file.
Variables | |
| const CAN_RX_MESSAGE_TYPE_s | can_rxMessages [] |
| const uint8_t | can_rxMessagesLength = sizeof(can_rxMessages) / sizeof(can_rxMessages[0]) |
Configuration for the CAN module.
SPDX-License-Identifier: BSD-3-Clause
Redistribution and use in source and binary forms, with or without modification, are permitted provided that the following conditions are met:
THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT HOLDER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
We kindly request you to use one or more of the following phrases to refer to foxBMS in your hardware, software, documentation or advertising materials:
The CAN bus settings and the received messages and their reception handling are to be specified here.
Definition in file can_cfg_rx.c.
| const CAN_RX_MESSAGE_TYPE_s can_rxMessages[] |
registry of CAN RX messages
Definition at line 76 of file can_cfg_rx.c.
| const uint8_t can_rxMessagesLength = sizeof(can_rxMessages) / sizeof(can_rxMessages[0]) |
length of CAN message arrays
Definition at line 93 of file can_cfg_rx.c.
 1.9.1
1.9.1 